


资源概况
- 仿真工程源文件(使用Matlab里面的Simulink打开)
- 配套设计报告

- 不提供指导服务;
- 电子资源,一经售出,概不退款;
- 每年售卖数量有限,售完为止。
资源介绍(截取部分,完整请购买)
一、组员任务分工说明
xxx同学负责绘画出带控制点的工艺流程图,并构建控制方案的原理方框图。xxx同学完成了在MATLAB中仿真模型的搭建,参数调试和仿真结果的分析整理。xxz同学负责整合上述两位同学的课设内容,撰写完整设计报告。
锅炉是全厂重要的动力设备,其任务是供给合格稳定的蒸汽,以满足生产的需要。为此,锅炉生产过程的各个主要参数都必须严格控制。锅炉设备是一个复杂的控制对象,主要输入变量包括负荷、锅炉给水、燃料量、减温水、送风和引风量等,主要输出变量包括汽包水位、过热蒸汽温度及压力、烟气氧量和炉膛负压等。因此锅炉是一个多输入、多输出且相互耦合的复杂控制对象。
对于锅炉汽包温度控制系统来说,被控变量为汽包温度,主操纵变量为给水量。控制目的是汽包内温度在允许范围内波动。

对象特性是指控制对象的输出参数和输入参数之间的相互作用规律。
此次课设中,假定影响汽包温度的主要因素仅考虑生产负荷和燃料量,并假设:
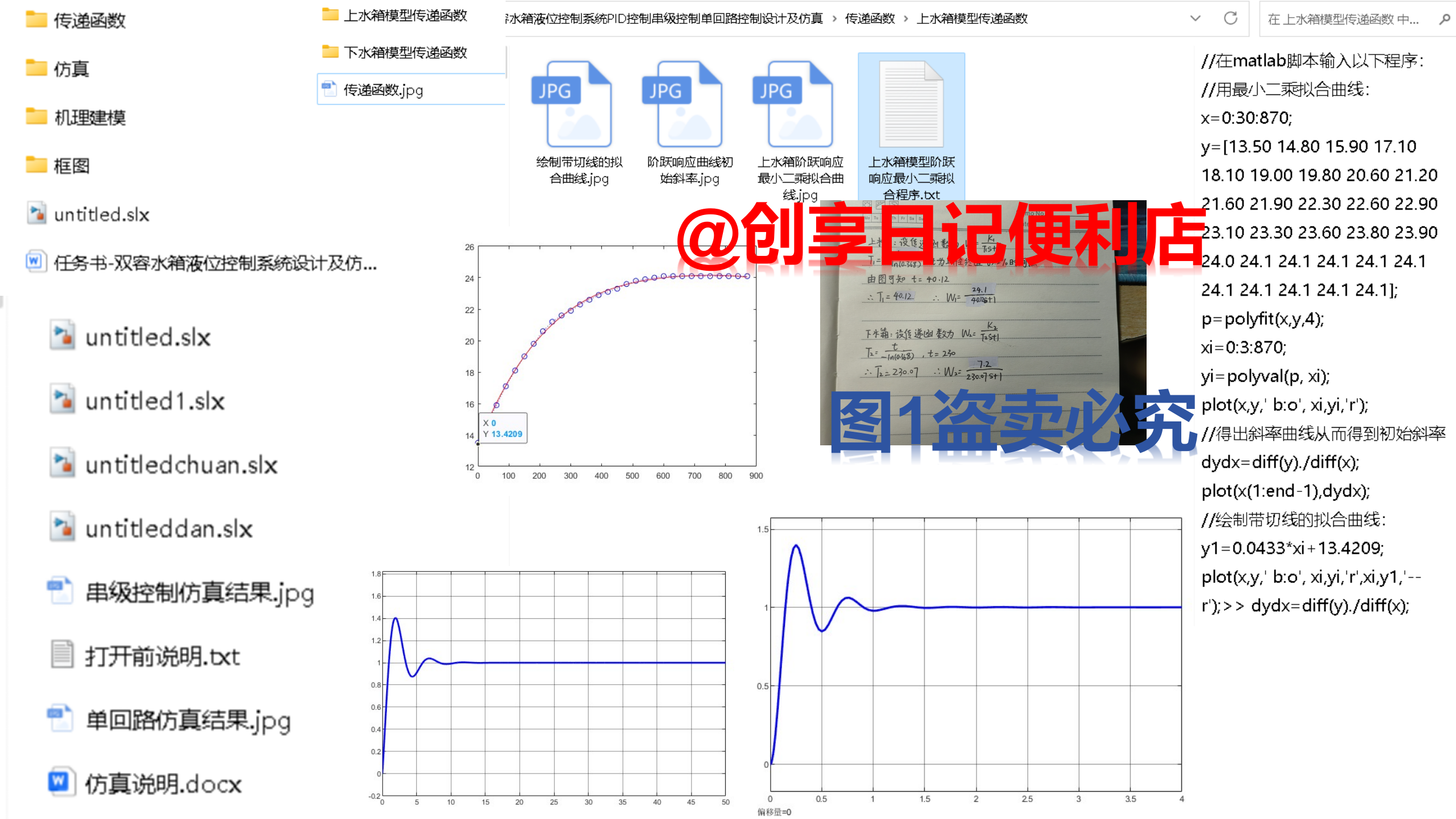
汽包温度对象的特性为:

燃料流量的特性为:

生产负荷对汽包温度的扰动特性为:



4.3前馈反馈回路设计

前馈控制的是操纵变量(指执行器控制的某一工艺变量,在此次仿真中,也就是燃料量),不包括被控变量(即汽包温度)。
5.1 单闭环回路设计仿真
闭环系统与给定信号和检测装置中的扰动无关,因为它具有较强的抗扰性能,但是单闭环系统对于有纯滞后的系统来说,仅仅依靠比例控制,如下图:

系统会产生较大的超调,并且反应时间会较长,最后稳定在给定值以上,即有静差。

所以要添加PID控制如下图:

PID参数正定,利用simulink模块自带整定,得出结果(参数详见报告)。
积分环节会消除静差,微分环节可以消除滞后,加快系统反应。
如图所示:系统超调减小,反应速度加快,调节过程变稳定。

5.2串级控制设计仿真
仿真模型如下:

仿真波形图如下:

将串级与原单闭环进行比较:超调量减少,反应时间由于滞后接近一致,也就是反应时间较快。进行内部的pid参数整定时需先将主回路断开,进行副回路的pid参数整定。如下图所示。

PID参数:
(1)外部的PID参数(参数详见文末获取)。
(2)内部的PID参数(参数详见文末获取)。
串级控制进行完参数整定后的响应曲线如图5.11所示。

5.3前馈控制系统设计仿真
仿真图如下:

仿真波形如下:

PID参数(参数详见文末获取)
与原单闭环进行比较:

结论是超调大幅度减小,反应时间变快。
6.1 结论
(1)无论是单闭环、串级还是前馈控制,都可以实现系统稳定。
(2)单闭环具有PID的控制系统可以快速调节,但是串级控制系统可以更大地减小超调,加快系统调节,而前馈控制系统通过提前消除扰动的影响,保证了系统的稳定性和快速性。
6.2 心得
Simulink具有适应面广、结构和流程清晰及仿真精细、贴近实际、效率高、灵活等优点,并基于以上优点Simulink已被广泛应用于控制理论和数字信号处理的复杂仿真和设计。所以学会熟练运用simulink对我们以后的学习有着很大的帮助。
通过对单闭环、串级和前馈控制系统的设计,让我们明白了PID各环节的作用以及三种方法的特点,让我们对过程控制这门课有了更多的了解。这此课设增强了我们小组成员的团队意识和分工合作能力。我们收获颇丰。









暂无评论内容