


资源概况
- 仿真工程源文件(使用Matlab里面的Simulink打开)
- 配套设计报告

- 不提供指导服务;
- 电子资源,一经售出,概不退款;
- 每年售卖数量有限,售完为止。
资源介绍(截取部分,完整请购买)
摘要:本文主要介绍了双容水箱的液面控制系统的设计和仿真过程。在对双容水箱进行建模之后,为满足系统设计的要求,选择了串级控制方案;控制方法选择了传统PID串级控制和模糊PID串级控制。PID控制能满足设计需要且控制算法简单。最后通过MATLAB仿真进行仿真验证以及对参数进行调整。
关键词:双容水箱建模,串级控制,PID控制,MATLAB仿真
题目二:双容水箱液位控制系统的设计与仿真
双容水箱液位控制系统是由两个独立的单容水箱串联所构成的,因此其数学模型是结合两个单容水箱的数学模型所建立的。双容水箱是液位系统中最常见的控制模型, 若其流入量与流出量相同,则水箱液位动态平衡。液位平衡后,如果输入输出量不一致,那么就会导致水箱高度变化;双容水槽中的下水槽液位即为这个系统中的被控量,通常选取上水槽的进水流量为操纵量,使下水箱的液位保持在一定高度。由于水箱的流入量可以调节, 流出量随液位高度的变化而变化, 所以建立水箱的数学模型,即建立流入量与液位高度之间的数学关系。

1、基于液位平衡原理,建立双容水箱液位控制系统的数学模型,并采用平衡点线性化方法建立线性化模型;
2、采用模糊PID控制方法,在线调整PID控制器的参数,实现双容水箱的液位调节,给出详细的控制方案;
3、用Simulink搭建仿真框图,实现系统的仿真,在线调节PID参数,并分析系统性能。
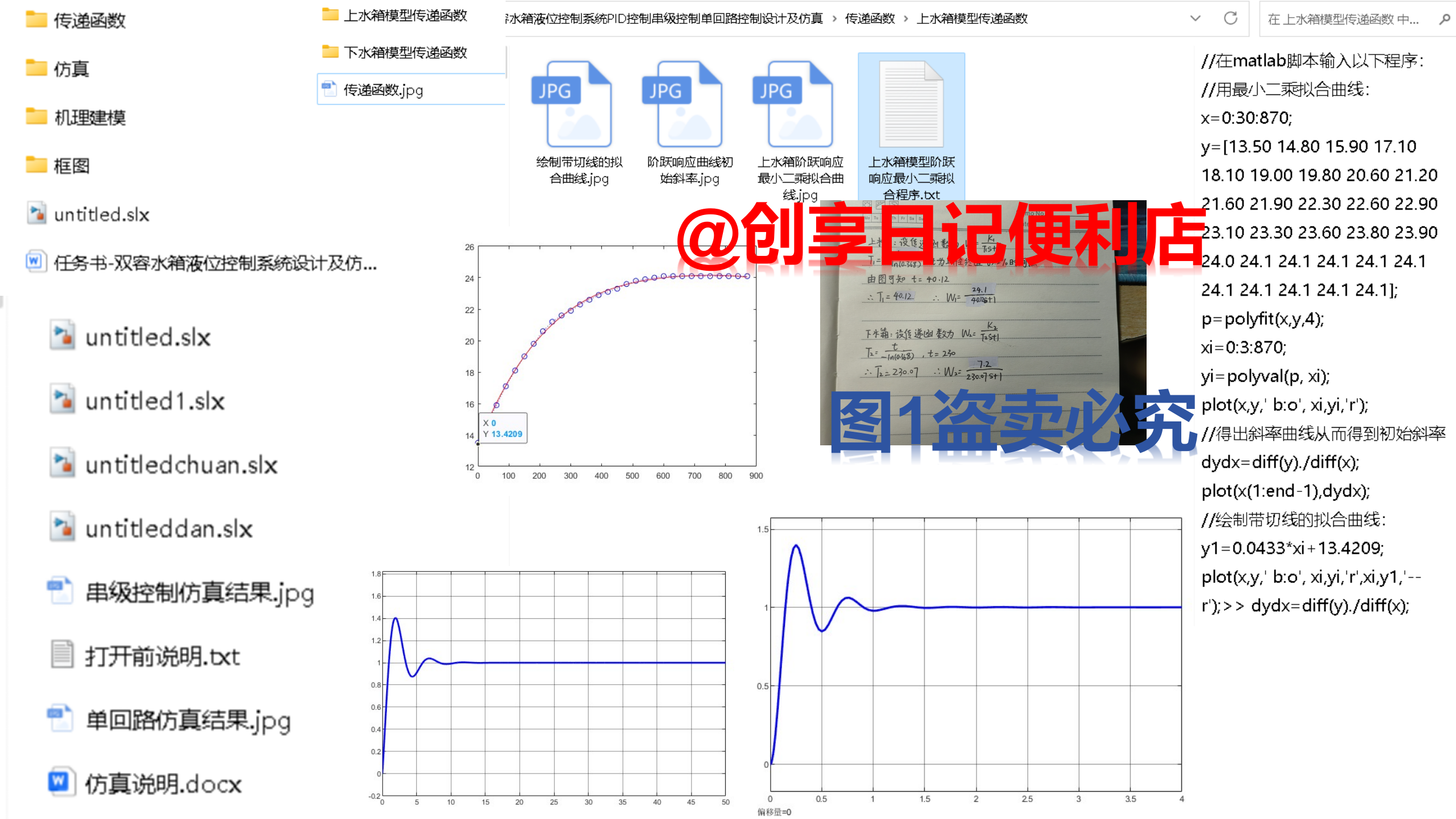
假设水箱上下均匀,上水箱横截面积是,下水箱横截面积是,水箱液位变化范围为 0~50cm。上水箱的液位高度为,进水流量为,流量大小通过电动调节阀的开度控制,出水流量(即下水箱的进水流量)为;下水箱的液位高度为,出水流量为。,为水箱的两个出水口调节阀的液阻。

此系统需要完成对下水箱液位的控制,当系统遇到扰动时,下水箱液位能快速恢复到所给定的液位值上;当被控对象模型参数发生变化时,所设计的控制器仍能使系统稳定到所给定的液位值上。
设计一个PID控制器,按照要求应该分别给出传统 PID 串级控制和模糊 PID 串级控制两种方法的详细控制方案。所谓串级控制,就是采用两个控制器串联工作,外环控制器的输出作为内环控制器的设定值,由内环控制器的输出去操纵控制阀,从而对外环被控量具有更好的控制效果。PID串级控制就是串级控制中的两个控制器均为PID控制器。
按偏差的比例、积分和微分进行控制的控制方案简称为PID控制。常规PID控制系统主要由被控对象和Pm控制器所组成,PID控制器是一种线性控制器,它是将给定值r(t)与输出值y(t)构成的偏差按比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。
模糊控制由四个部分组成,分别是模糊化、知识库、推理机和反模糊化,系统包括一个常规PID控制器和一个模糊推理系统。偏差e和偏差的变化率ec作为模糊系统的输入,根据模糊控制规则进行模糊推理,参数, , 作为输出,不断在线实时调整PID参数的值,直到使系统达到较理想的控制效果,从而实现PID参数的自整定。模糊PID自整定控制系统能在控制过程中对不确定的条件、延迟和干扰等因素进行检测分析,采用模糊推理的方法实现PID参数, , 的在线自整定。这种系统不仅保持了常规PID控制系统的原理简单、使用方便、鲁棒性强等特点,而且具有更大的精确性、灵活性和适应能力 [2] 。
在控制系统中,误差信号的敏感程度是由主回路放大系数的数值来决定的。放大系数调整的更大对提高系统的抗干扰能力是有益处的。副回路的抗干扰能力要比主回路的抗干扰能力要强大。当注入到水箱里的水发生扰动,副控制器率先反映出流量的变化,而主控制器的输出用来改变副控制器的设定值,起到校正的作用,减少了扰动对液位变化的影响,提高了系统的控制品质[3]。
在设计这个液位控制系统时,就是需要把上水箱的液位作为副控制对象,下水箱的液位作为主控制对象,然后通过调节副控制器的输出从而使下水箱达到理想控制液位。而外环控制器则是作的输出则作为内环控制器的输入,来操作调节阀,进一步达到调整液位的目的,设计过程主要是PID控制器的参数的整定。
该双容水箱控制系统的传统PID控制就不重点介绍了,下面主要介绍模糊PID控制方法,其系统结构框图如下图所示。

1、模糊PID控制方案的实施步骤
(1)在Matlab命令行窗口输入fuzzy唤出fuzzy logic designer窗口进行编译。
(2)设置输入输出个数,如下图所示,并设置输入个数为2,范围均为[-2,2],输出个数为3,范围均为[-0.5,0.5]。

(3)编辑其隶属函数,如下图。
(4)按照以下规则进行模糊规则设计(NB为负大,NM为负中,NS为负小,ZO为零,PS为正小,PM为正中,PB为正大),以下表格横轴为EC,纵轴为E。(完整详见下载)

根据上表编写规则,如:
If (E is NB) and (EC is NB) then ( is PB)( is NB)(is PS) (1)
If (E is NB) and (EC is NM) then ( is PB)( is NB)( is NS) (1)
If (E is NB) and (EC is NS) then ( is PM)( is NM)( is NB) (1)
…
一共49条规则,详情请见下图。

2、进行模糊PID的参数自整定


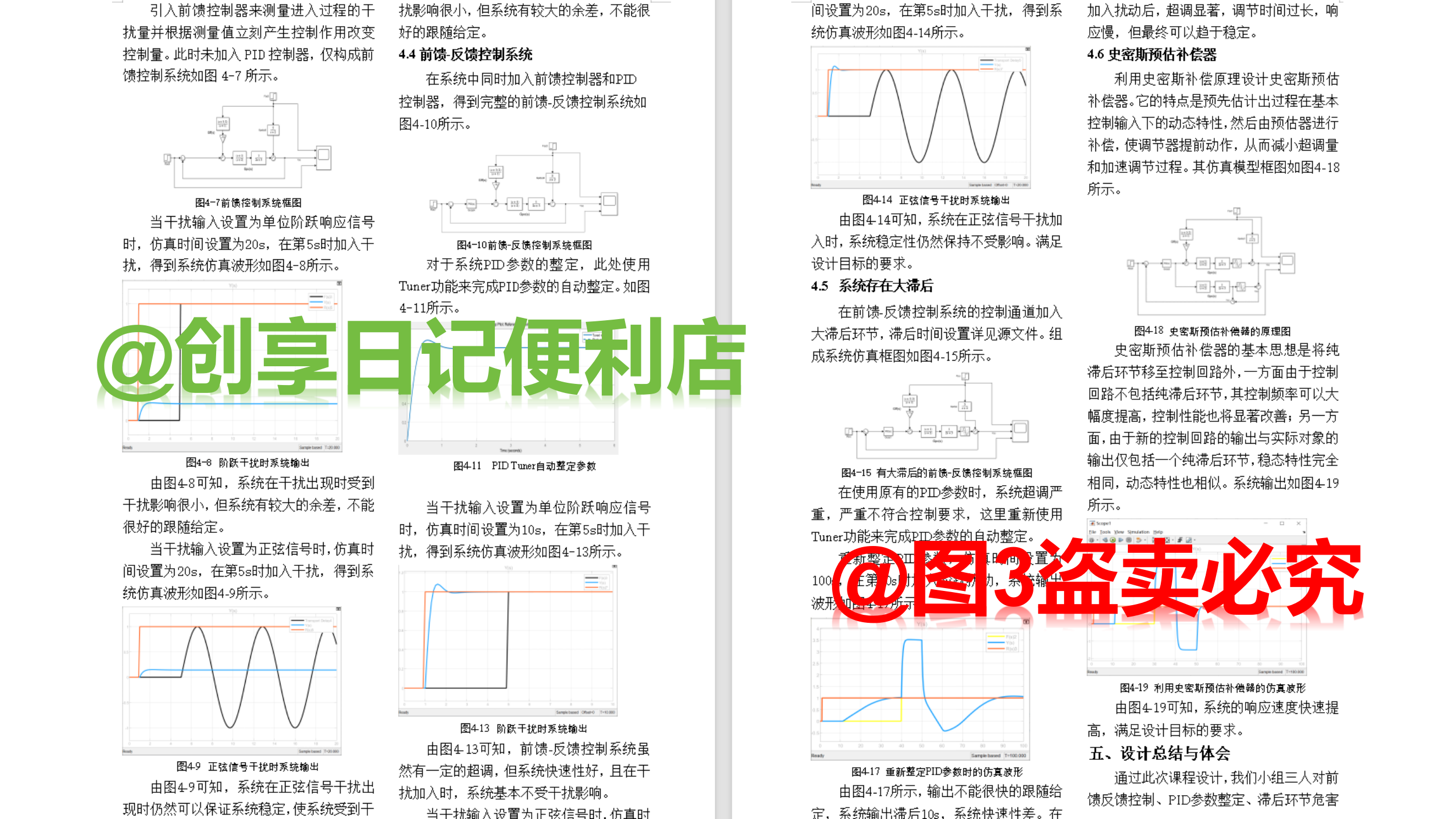
在Simulink中搭建如图(4-1)所示的双容水箱模糊PID控制系统仿真模型,对模糊控制器的各个编辑器进行编辑,将控制规则写入模糊控制规则编辑器,最终得到数据输出的清晰值实现对PID参数的在线整定,仿真结果如图(4-2)所示。红色线为系统响应,蓝色线为单位阶跃给定。由仿真波形图可以知道,超调量是10.3% ;上升时间是125.247s若取△=0.05,调节时间是297.386s。

由两个波形图可知,模糊PID串级控制比传统PID串级控制更优一些,传统PID控制,其算法简单实用,在控制中具有良好的控制效果和鲁棒性,但对液位控制这类具有非线性、时变等特点的控制系统则需要对PID参数不断进行在线调整才能获得更好的控制效果。在实际应用中由于PID参数变化无常,没有确定的数学模型和规律可循,模糊控制能充分利用操作人员进行实时非线性调节的成功实践操作经验。由仿真图可得,在前者的控制下,系统超调量更小,虽然其他动态性能都很相近,由对于模糊PID串级控制的模糊推理系统的调试并不是很熟悉,所以可能最后的调试结果并不是最优的。在模糊PID串级控制下的系统,最终进入稳态的时间明显比传统PID串级控制时更短。总体来说,模糊PID串级控制比传统PID串级控制更优效。
[1]刘志其,王双兴.双容水箱液位控制系统的建模及其PID控制算法研究[J].科技风,2015
[2]焦舟波.模糊PID控制研究及其在水箱过程控制系统中的应用[D].东华大学,2011.
[3]毕涛,刘迪,杨莉莉.基于串级控制系统控制液位的设计与分析[J].船电技术,2022,42(1):1-4.








暂无评论内容