

资源概况





资源介绍(截取部分,完整请购买)
1 绪论
2 总体设计方案
2.1 系统需求及方案设计
为了实现基于51单片机的步进电机控制的设计,本文将实现以下设计需求:
(1)实现按键控制步进电机正转、反转、加速、减速、停止;
(2)2个发光二极管显示正反转,1位7段LED数码管显示当前转速档位(共9个档位);
(3)4个红色LED,指示电机的转速;
(4)操作简单、功能完善、精确度高。
基于以上列出的几点,具体的设计框图如图2.1所示。

2.2 硬件器件介绍
2.3 所用软件介绍(篇幅有限,详见下载)
3 硬件设计

3.1 硬件电路组成
硬件电路由以下模块构成:
(1)单片机最小系统。用于驱动和控制其他模块,以实现整体功能,其以STC89C52单片机为核心芯片,并辅以复位电路和晶振电路。
(2)按键模块。实现按键控制步进电机正转、反转、加速、减速、停止。
(3)显示模块。1位7段LED数码管显示当前转速档位(共9个档位)。
(4)步进电机模块。
(5)转数指示模块及正反转指示模块。
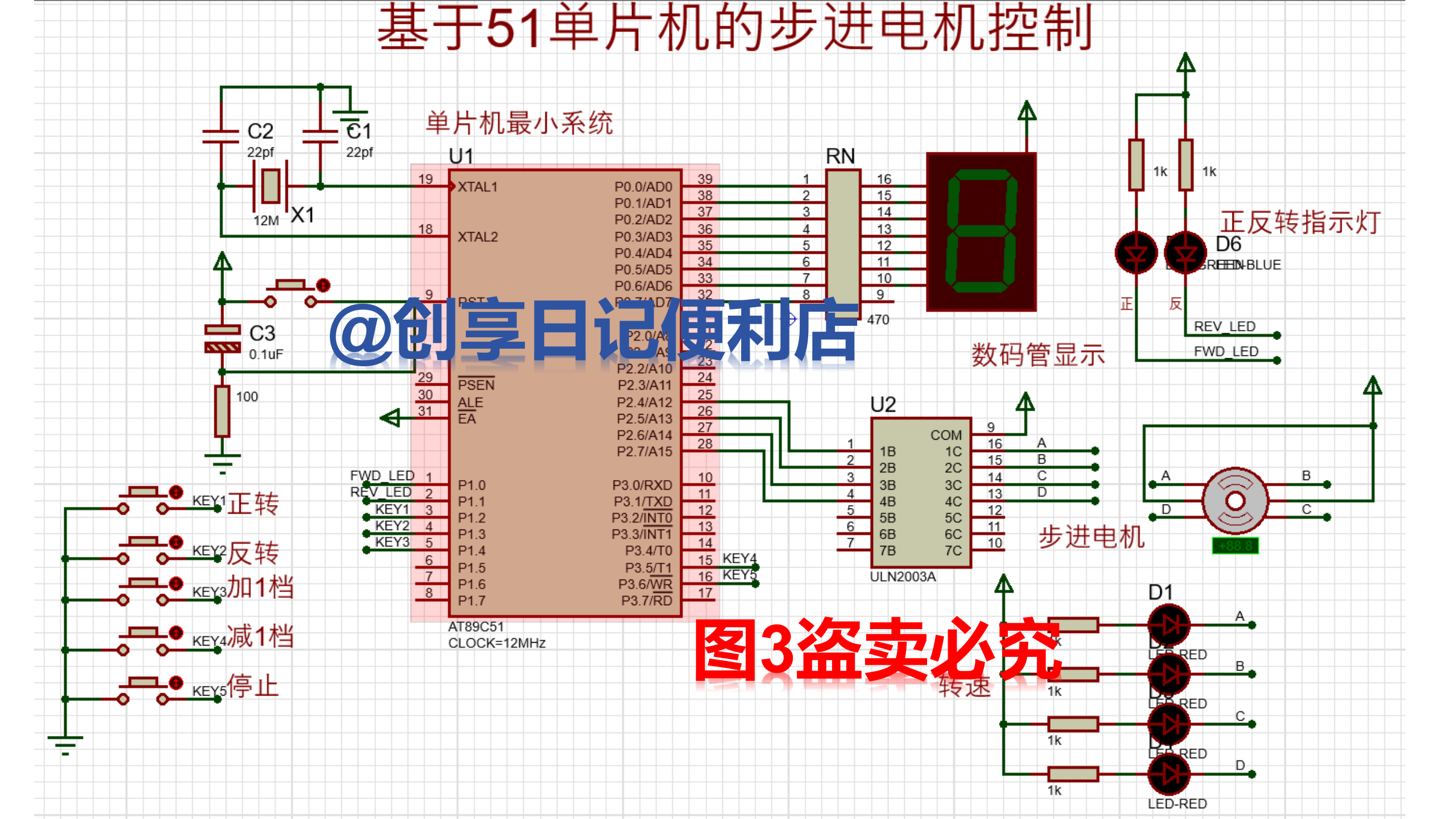
3.2 单片机最小系统电路
单片机最小系统是单片机扩展开发应用中最基础和最主要的部分,一般由以下的电路构成,是整个设计的核心其保证了基于单片机的其他功能的扩展与实现。如图3.2所示。
复位电路: 复位电路是单片机应用中的最基本和最重要的电路,用于处理单片机工作失灵等紧急问题。当单片机复位端口为高电平时,单片机中的代码将不会被执行。一开始上电时,电容还未充满电,复位端口为高电平,避免了直接上电就运行程序导致的程序错误等问题。当电容充满电后,复位端口变为低电平,程序开始运行。
晶振电路:晶振电路也是的单片机设计中必备的电路,为系统提供工作时序。本毕设晶振电路提供11.0592MHZ时钟频率,以此构成整个稳定的振荡电路,为单片机的正常工作提供保障。
3.3数码管显示电路
数码管显示电路由1位7段LED数码管显示当前转速档位(共9个档位),具体如图3.3所示。

3.4 按键电路
按键电路需要实现按键控制步进电机正转、反转、加速、减速、停止,总共有5个按键,具体如图3.4所示。

3.5 电机及驱动电路
电机及驱动电路由ULN2003驱动芯片、DC-5V步进电机、转数指示灯等构成,具体如图3.5所示。

4 软件设计
4.1 软件设计需求及设计思路
根据本文设计需求,在第三章硬件电路设计的基础上,需要通过软件编程实现的具体功能:
(1)驱动各个模块工作,实现数码管的清晰显示,实现电机驱动;
(2)实现按键控制步进电机正转、反转、加速、减速、停止;
(3)2个发光二极管显示正反转,1位7段LED数码管显示当前转速档位(共9个档位);
(4)4个红色LED,指示电机的转速;
4.2 部分主程序
//-----------------------------------------------------------------
// 主程序
//-----------------------------------------------------------------
void main()
{
T0_Init(); //定时器0初始化
T1_Init(); //定时器1初始化
FWD_LED = 0; //正转指示灯亮,默认初始化是正转
delay_ms(500); //延时500ms,待各个模块上电稳定
EA = 1; //开启中断
while(1)
{
KeyService(); //按键服务程序
}
}
//-----------------------------------------------------------------
// Timer0 初始化,模式1,允许中断,1ms定时
// Timer0 用于按键扫描
//-----------------------------------------------------------------
void T0_Init()
{
TMOD &= 0xF0;
TMOD |= 0x01; //T0工作于模式1,16位定时器
TH0 = (65536 - 1000) >> 8; //1ms定时
TL0 = (65536 - 1000) & 0xFF;
ET0 = 1; //允许T0中断
TR0 = 1; //启动T0
}
//-----------------------------------------------------------------
// Timer1 初始化,模式1,允许中断
// Timer1 用于改变步进电机转速
//-----------------------------------------------------------------
void T1_Init()
{
TMOD &= 0x0F;
TMOD |= 0x10; //定时器1工作于模式1,16位定时器
TH1 = Timer[speed][0];
TL1 = Timer[speed][1]; //定时器1,定时用于步进电机转速控制
ET1 = 1; //允许T1中断
PT1 = 1; //定时器1优先级高
TR1 = 0; //关闭定时器1
}
//-----------------------------------------------------------------
// Timer0 中断服务程序
//-----------------------------------------------------------------
void InterruptTime0() interrupt 1
{
TH0 = (65536 - 1000) >> 8; //1ms
TL0 = (65536 - 1000) & 0xFF;
KeyScan(); //按键扫描
}
//-----------------------------------------------------------------
// Timer1 中断服务程序
//-----------------------------------------------------------------
void InterruptTime1() interrupt 3
{
static step1 = 0;
static step2 = 0;
TH1 = Timer[speed - 1][0]; //根据不同的转速档位,给定时器1赋定时器值
TL1 = Timer[speed - 1][1];
//按照定时器1的频率循环发送正转励磁序列的脉冲给步进电机,使其不停地转动
if(flag1 == FwdRun)//正转
{
MotorDriver = FFW[step1++];
if(step1 == 8) step1 = 0;
}
//按照定时器1的频率循环发送反转励磁序列的脉冲给步进电机,使其不停地转动
else if(flag1 == RevRun)
{
MotorDriver = REV[step2++];
if(step2 == 8) step2 = 0;
}
}
//-----------------------------------------------------------------
// 按键服务程序
//-----------------------------------------------------------------
void KeyService()
{
switch (KeyCode)
{
case 1: flag1 = FwdRun; //正转
FWD_LED = 0; REV_LED = 1; //正转指示灯亮
KeyCode = 0;
break;
case 2: flag1 = RevRun; //反转
FWD_LED = 1; REV_LED = 0; //反转指示灯亮
KeyCode = 0;
break;
case 3: speed++; //速度加
if(speed == 10) speed = 1;
SpeedShow = SEG_CODE[speed];
if(TR1 == 0) TR1 = 1;
KeyCode = 0;
break;
case 4: speed--; //速度减
if(speed == 0 || speed == -1 ) speed = 9;
SpeedShow = SEG_CODE[speed];
if(TR1 == 0) TR1 = 1;
KeyCode = 0;
break;
case 5: TR1 = 0; //停止
SpeedShow = 0xFF;
MotorDriver = 0x00;
KeyCode = 0;
break;
default: ;
}
}5 仿真演示
5.1 仿真实现
5.1.1 仿真电路图

根据第四章软件设计的思路,结合仿真需求,我们将仿真设计的C代码利用KEIL5编写好,并进行详细地注释。接着,我们点击“create HEX file”,并再次编译程序,这样就会生成HEX烧录文件,具体如图5.2所示。

接着,我们打开仿真原理图,并将生产的“HEX”文件烧录到单片机芯片中,点击开始仿真,就可以实现相关仿真了,我们将在下一节中具体展示仿真的结果。
5.1.2 仿真结果
仿真主要实现:转数显示、正转与反转指示、转数指示,具体如图5.3所示。













暂无评论内容