资源概要
- 仿真工程源文件(使用Matlab里面的Simulink打开)
- 设计任务书
- 配套设计报告
- 建模过程、传递函数计算过程
- 无水印仿真框图、仿真结果截图等
- 不提供指导服务;
- 电子资源,一经售出,概不退款;
- 每年售卖数量有限,售完为止。
资源介绍(截取部分,完整请购买)
一、摘要
本文围绕双容水箱液位精准控制需求,开展控制系统设计与仿真研究。系统以上、下两个串联水箱为被控对象,通过机理建模法结合流体力学原理,推导得到下水箱液位与电动阀门开度间的传递函数模型;同时采用阶跃响应曲线法,在系统稳定(上水箱初始液位13.5cm、下水箱初始液位2.1cm)后,通过电动阀门开度阶跃增加10%的测试,结合MATLAB最小二乘法数据拟合与拐点切线分析,建立上、下水箱单容数学模型。为实现下水箱液位动态不超过25cm、最大误差±0.2cm的控制目标,完成静压式压力变送器选型,并设计单回路闭环控制系统与抗干扰串级控制系统(上水箱为副回路、下水箱为主回路)。利用MATLAB平台对两种系统建模,分别采用4:1衰减曲线法整定单回路P/PI/PID参数、两步整定法整定串级系统主副回路参数,对比分析不同调节规律下系统的上升时间、峰值时间、调节时间及超调量等性能指标。通过设定一阶惯性环节干扰,验证串级系统对进水阀阀前压力/流量干扰的强抑制能力。研究结果为双容对象液位控制提供了可靠的模型支撑与优化控制方案,也为工业过程中多容系统控制设计提供实践参考。
二、引言
2.1 研究背景与意义
液位控制是工业生产的核心环节,在石油化工、水处理、食品加工等领域广泛应用,其控制精度直接影响生产效率、产品质量与设备安全——液位过高易引发溢出事故,过低可能导致设备空转损坏,因此稳定可靠的液位控制系统是工业运行的关键保障。
双容水箱系统作为典型“多容滞后”对象,上下水箱串联结构形成明显滞后效应,且易受进水压力波动、阀门漂移等干扰,与工业中多级精馏塔、串联储罐等实际设备特性高度吻合,成为研究多容系统控制的理想实验平台,可直接映射工业控制难点。
从实践价值来看,本研究通过机理建模与阶跃响应测试结合MATLAB数据处理,能掌握被控对象建模全流程;通过单回路与串级控制设计、PID参数整定及仿真对比,可明晰不同控制策略优劣,验证经典控制理论在多容对象中的适用性。同时,基于MATLAB的仿真优化模式,符合现代工业“仿真先行、实验验证”的设计趋势,既能降低物理实验成本,也为工业多容系统控制设计提供理论与实践参考,对提升过程控制工程应用能力具有重要意义。
2.2 研究目标与主要内容
2.2.1 研究目标
以双容水箱液位精准控制为核心,实现三大目标:一是建立可靠的数学模型,通过机理法与阶跃响应测试法,明确下水箱液位与电动阀门开度的动态关联;二是达成液位精准控制,确保下水箱动态液位不超过25cm,最大误差控制在±0.2cm内;三是验证系统抗干扰能力,针对进水阀阀前压力、流量扰动,设计并优化控制方案,保障液位稳定。
2.2.1 主要内容
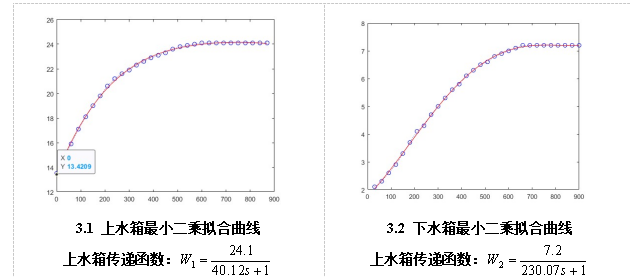
- 数学建模:基于流体力学原理,结合水箱截面积、线性液阻等参数,用机理法推导通用模型;通过阶跃响应测试(电动阀开度阶跃增10%),结合MATLAB最小二乘法拟合与拐点切线分析,建立上、下水箱单容模型。
- 检测元件选型:根据液位控制要求,完成静压式压力变送器的量程、精度选型,并明确安装注意事项。
- 控制系统设计:设计单回路闭环控制系统(下水箱液位为被控量,PID为控制器)与串级控制系统(上水箱为副回路、下水箱为主回路),绘制系统框图与仪表流程图。
- 仿真与参数整定:在MATLAB中搭建两种系统模型,用4:1衰减曲线法整定单回路P/PI/PID参数,用两步整定法整定串级系统主副回路参数,对比分析不同调节规律的控制性能(上升时间、超调量等)。
- 抗干扰验证:设定一阶惯性环节干扰,通过MATLAB仿真,对比单回路与串级系统的抗干扰效果,验证串级系统对副回路干扰的抑制能力。
三、双容水箱系统数学模型建立
3.1 系统结构与工作原理
3.1.1、系统结构组成
双容水箱液位控制系统主要由储水单元、动力单元、控制单元及检测单元四部分构成,具体组件及功能如下:
1、储水单元:包含上水箱、下水箱与储水箱。上水箱(截面积)为一级缓冲容器,下水箱(截面积)为核心被控对象,储水箱为系统提供稳定水源;
2、动力与调节单元:由增压泵、电动阀(开度,范围0~100%)及手动阀门、组成。增压泵为水流提供动力,电动阀作为核心执行元件调节进水流量(流量比值系数),、用于单独控制上、下水箱的进出水,实现单容特性测试;
3、阻力单元:包含线性液阻(上水箱出水口)与(下水箱出水口),用于模拟工业系统中流体流动的阻力特性,影响液位变化速率;
4、检测单元:采用静压式压力变送器,分别采集上、下水箱液位信号(为上水箱液位,为下水箱液位),为控制决策提供数据支撑。
3.1.2、系统工作原理
系统遵循“水源供给-一级缓冲-二级控制”的流程实现液位调节:
1、供水阶段:储水箱中的水经增压泵加压后,通过电动阀进入上水箱,电动阀开度直接决定上水箱的进水流量;
2、缓冲传递阶段:上水箱液位升高至一定高度后,借助液位差产生的压力,水流经线性液阻流入下水箱,形成“上水箱液位-下水箱进水流量”的关联传递;
3、控制核心阶段:以“下水箱液位稳定在设定值”为目标,检测单元实时采集信号并反馈至控制器,控制器对比实际液位与设定值的偏差,输出控制信号调节电动阀开度—若低于设定值,增大提升上水箱进水流量,间接增加下水箱进水;若高于设定值,减小降低流量,最终通过闭环调节使维持在允许范围内(动态≤25cm,误差±0.2cm)。
4、单容测试模式:当需测试上水箱单容特性时,关闭阻断下水箱出水,仅通过调节上水箱排水;测试下水箱单容特性时,通过稳定上水箱进水,仅调节控制下水箱排水,实现单容对象的独立特性分析。
3.1.3、 机理法建模
基于流体力学原理,结合水箱截面面积、,线性液阻、,电动阀门开度(0~100%),流量比值系数等参数,推导的通用数学模型,详细说明建模过程中的假设条件与公式推导步骤:(原图详见下载)
3.1.4、机理法建模结果
四、仿真实验
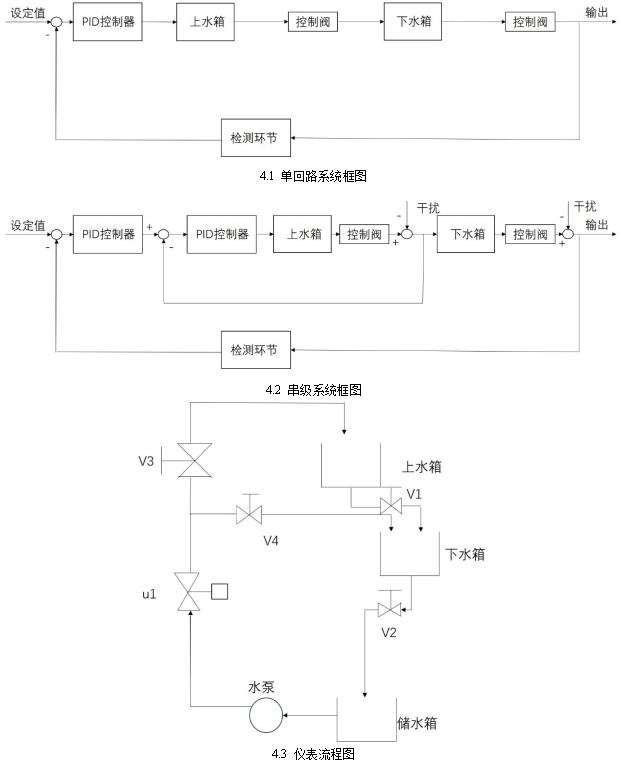
4.1 系统的框图和仪表流程图
为保持下水箱液位的稳定,设计中采用单回路闭环控制系统,将下水箱液位信号经水位检测器送至控制器(PID),控制器将实际水位与设定值相比较,产生输出信号作用于执行器(控制阀),从而改变流量调节水位,设执行机构和检测环节的传递函数为1,用画出系统的框图和仪表流程图:
4.2 仿真结果
4.2.1 仿真框图
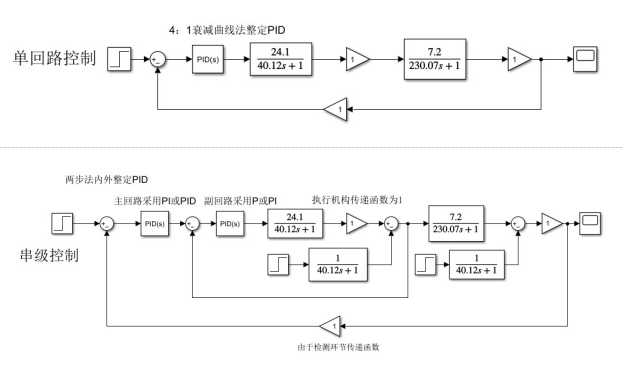
4.2.2 仿真结果
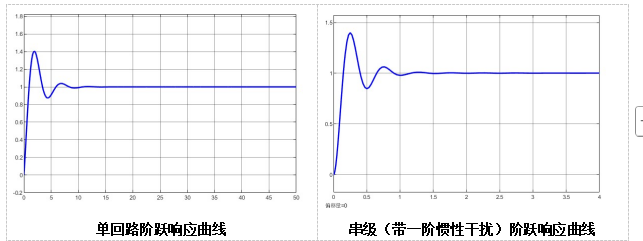
4.3 仿真说明
4.3.1 PID整定过程
4.3.2 PID对系统稳定性的影响
4.3.3 PID对系统性能的影响
(详见下载)
四、设计体会
通过本次双容水箱液位控制系统的设计与仿真研究,我不仅完成了从理论建模到控制方案落地的全流程实践,更在工业过程控制的工程思维与实操能力上获得了显著提升。
建模阶段是本次设计的基础,最初仅依赖流体力学公式推导机理模型时,常因忽略液阻非线性误差、参数假设理想化导致模型与实际预期偏差较大。直到结合阶跃响应测试数据,用MATLAB最小二乘法拟合曲线、绘制拐点切线修正模型,才真正理解“理论推导+实验验证”结合的重要性—这让我意识到,工业被控对象的建模绝非单纯的公式计算,需充分考虑实验误差与实际工况,通过数据处理手段提升模型可靠性。
在控制系统设计与参数整定环节,单回路PID与串级控制的对比实践给我留下深刻印象。起初单回路系统在进水压力干扰下,下水箱液位波动超差明显,一度困惑于如何优化;直到引入串级控制,以上水箱液位为副回路快速抑制进水扰动,主回路再精准调节下水箱液位,系统稳定性才大幅提升。而4:1衰减曲线法与两步整定法的应用过程中,从反复调整比例系数观察衰减趋势,到根据超调量、调节时间优化积分与微分参数,我逐渐摸清了P、I、D调节规律的协同逻辑:P环节快速响应偏差,I环节消除静差,D环节抑制超调,三者的合理搭配是平衡系统响应速度与稳定性的关键。
此外,MATLAB仿真工具的深度应用也让我突破了传统实验的局限。通过搭建虚拟系统,我可快速迭代测试不同参数组合、模拟多种干扰场景,不仅节省了物理实验的时间与成本,更能直观对比不同控制方案的性能差异——这种“仿真先行、优化后验”的模式,让我真切感受到现代工业控制设计中数字化工具的核心价值。
当然,设计过程中也暴露了自身的不足,比如初期对串级控制主副回路分工的理解不够深入,导致副回路参数整定过度依赖经验;对液位变送器安装细节的考虑不够周全,经查阅技术手册后才补充了安装位置避开水流冲击、接线防干扰等关键注意事项。这些问题让我明白,工业控制设计需兼顾控制逻辑、硬件选型与现场安装,任何环节的疏漏都可能影响系统最终性能。
总体而言,本次设计不仅是对《工业过程控制》课程知识的综合应用,更让我体会到工程实践的严谨性与系统性。从抽象的数学模型到具象的控制曲线,从单一控制方案到多方案对比优化,每一步都需要理论支撑与实操验证的结合。这种思维与能力的提升,将为我后续接触工业现场控制项目、解决实际工程问题奠定坚实基础。
五、参考文献













暂无评论内容