资源概况
购买将获得:完整无水印报告+工程源文件
其他注意:一经购买,概不退款,不提供指导,每年数量有限,售完为止。
资源介绍(截取部分,完整请购买)

摘要(实现功能)
本课题组设计制作了一款具有智能判断功能的小车,功能强大。小车具有以下几个功能:自动避障功能;寻迹功能(按路面的黑色轨道行驶);趋光功能(寻找前方的点光源并行驶到位);检测路面所放置的铁片的个数的功能;计算并显示所走的路程和行走的时间,并可发声发光。
作品以两电动机为主驱动,通过各类传感器件来采集各类信息,送入主控单元AT89S52单片机,处理数据后完成相应动作,以达到自身控制。电机驱动电路采用高电压,高电流,四通道驱动集成芯片L293D。其中避障采用红外线收发来完成;铁片检测部分采用电感式接近开关LJ18A3-8-Z/BX检测;黑带检测采用红外线接收二极管完成;趋光部分通过3路光敏二极管对光源信号的采集,再经过ADC0809转化为数字信号送单片机处理判别方向。由控制单元处理数据后完成相应动作,实现了无人控制即可完成一系列动作,相当于简易机器人。
关键字:智能控制 蔽障 红外线收发 寻迹行驶 趋光行驶
方案一:采用各类数字电路来组成小车的控制系统,对外围避障信号,黑带检测信号,铁片检测信号,各路趋光信号进行处理。本方案电路复杂,灵活性不高,效率低,不利于小车智能化的扩展,对各路信号处理比较困难。
方案二:采用ATM89S52单片机来作为整机的控制单元。红外线探头采用市面上通用的发射管与及接收头,经过单片机调制后发射。铁片检测采用电感式接近开关LJ18A3-8-Z/BX检测,黑带采用光敏二极管对光源信号采集,再经过ADC0809转化为数字信号送到单片机系统处理。此系统比较灵活,采用软件方法来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现,能很好地满足题目的要求。
比较以上两种方案的优缺点,方案二简洁、灵活、可扩展性好,能达到题目的设计要求,因此采用方案二来实现。方案二的基本原理如图1所示。

避障部分采用红外线发射和接受原理。铁片检测采用电感式接近开关LJ18A3-8-Z/BX检测,产生的高低电平信号经过处理后,完成相应的记录数目,驱动蜂鸣器发声。黑带寻迹依*安装在车底部左右两个光敏二极管对管来对地面反射光感应。寻光设计在小车前端安装3路(左、中、右)光敏电阻对光源信号采集,模拟信号经过ADC0809转化为数字信号送到MCU处理。记程通过在车轮上安装小磁块,再用霍尔管感应产生计数脉冲。记时由软件实现,显示采用普通七段LED。此系统比较灵活,采用软件方法来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现。
1)避障方案选择
方案一:采用超声波避障,超声波受环境影响较大,电路复杂,而且地面对超声波的反射,会影响系统对障碍物的判断。
方案二:采用红外线避障,利用单片机来产生38KHz信号对红外线发射管进行调制发射,发射出去的红外线遇到避障物的时候反射回来,红外线接收管对反射回来信号进行解调,输出TTL电平。外界对红外信号的干扰比较小,且易于实现,价格也比较便宜,故采用方案二。
红外线发射接受电路原理图如图2所示。
采用红外线避障方法,利用一管发射另一管接收,接收管对外界红外线的接收强弱来判断障碍物的远近,由于红外线受外界可见光的影响较大,因此用250Hz的信号对38KHz的载波进行调制,这样减少外界的一些干扰。 接收管输出TTL电平,有利于单片机对信号的处理。采用红外线发射与接收原理。利用单片机产生38KHz信号对红外线发射管进行调制发射,发射距离远近由RW调节,本设计调节为10CM左右。发射出去的红外线遇到避障物的时候反射回来,红外线接收管对反射回来信号进行解调,输出TTL电平。利用单片机的中断系统,在遇障碍物时控制电机并使小车转弯。由于只采用了一组红外线收发对管,在避障转弯方向上,程序采用遇障碍物往左拐方式。如果要求小车正确判断左转还是右转,需在小车侧边加多一组对管。外界对红外信号的干扰比较小,性价比高。 。调试时主要是调制发射频率为接收头能接收的频率,采用单片机程序解决。发射信号强弱的调节,由可调精密电阻调节。

2)检测铁片方案选择
方案一:采用电涡流原理自制的传感器,取才方便,但难以调试,输出信号也不可*,成功率比较低,难以准确输出传感信息。
方案二:采用市面易购的电感式接近开关,本系统采用市面比较通用LJ18A3-8-Z/BX来完成铁片检测的任务。虽然电感式接近开关占的体积大,对本是可以接受,且输出信号较可*,稳定性好,受外界的干扰小,故采用方案二。
检测铁片电路原理图如图3所示。

3)声音提示
方案一:采用单片机产生不同的频率信号来完成声音提示,此方案能完成声音提示功能,给人以提示的可懂性比较差,但在一定程度上能满足要求,而且易于实现,成本也不高,我们出自经费方面考虑,采用方案一。
方案二:采用DS1420可分段录放音模块,能够给人以直观的提示,但DS1420录放音模块价格比较高,也可以采用此方案来处理,但方案二性价比不如方案一。
4)黑带检测方案选择
方案一:采用发光二极管发光,用光敏二极管接收。由于光敏二极管受可见光的影响较大,稳定性差。
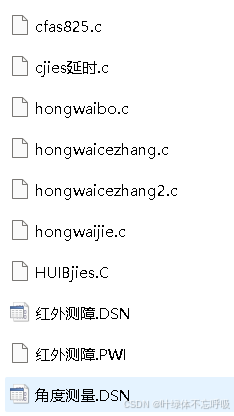
方案二:利用红外线发射管发射红外线,红外线二极管进行接收。采用红外线发射,外面可见光对接收信号的影响较小,再用射极输出器对信号进行隔离。本方案也易于实现,比较可*,因此采用方案二。黑带检测电路图如图4所示。
输出信号进入74LS02。稳定性能得到提升。当小车低部的某边红外线收发对管遇到黑带时输入电平为高电平,反之为低电平。结合中断查询方式,通过程序控制小车往哪个方向行走。电路中的可调电阻可调节灵敏度,以满足小车在不同光度的环境光中能够寻迹。由于接收对管装在车底,发射距离的远近较难控制,调节可调电阻,发现灵敏度总是不尽人意,最后采用在对管上套一塑料管,屏蔽外界光的影响,灵敏度大幅提升。再是转弯的时间延迟短长控制。
5)计量路程方案
方案一:利用红外线对射方式,在小车的车轮开一些透光孔来计量车轮转过圈数,从而间接地测量路程。
方案二:利用霍尔元件来对转过的车轮圈数来计程,在车轮子上装小磁片,霍尔元件*近磁片一次计程为车轮周长。此方案传感的信号强, 电路简单,但精度不高。
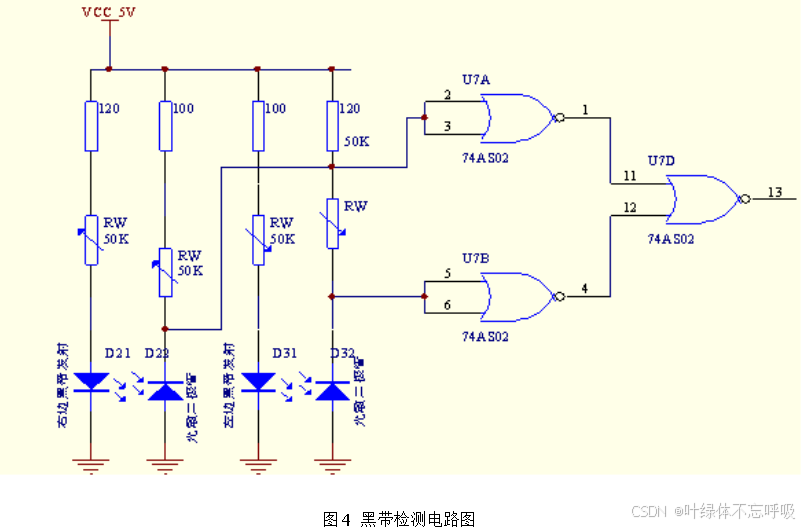
如果想达到一定的计量精度,用霍尔传感元件比较难以实现,因为在车轮上装一定量的小磁片会相互影响,而利用红外线对射方式不会影响各自的脉冲,可达到厘米的精度,因此采用方案一来实现。计量路程示意图见图5。
通过计算车轮的转数间接测量距离,利用了霍尔元件感应磁块产生脉冲的原理,再对脉冲进行计数。另可采用红外线原理提高记程精度,其方法为在车轮均匀打上透光小孔,当车轮转动时,红外光透射过去,不断地输出脉冲,通过单片机对脉冲计数,再经过一个数据的处理过程,这样就可把小车走过的距离计算出来,小孔越多,计数越精密。
6)智能车驱动电路
方案一:采用分立元件组成的平衡式驱动电路,这种电路可以由单片机直接对其进行作,但由于分立元件占用的空间比较大,还要配上两个继电器,考虑到小车的空间问题,此方案不够理想。
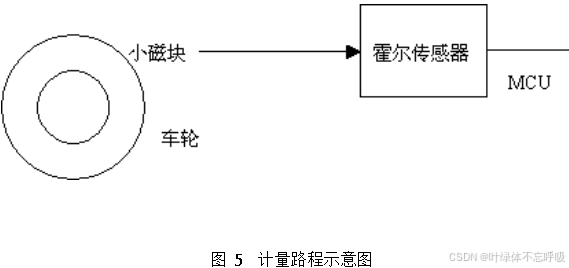
方案二:因为小车电机装有减速齿轮组,考虑不需调速功能,采用市面易购的电机驱动芯片L293D,该芯片是利用TTL电平进行控制,对电机的作方便,通过改变芯片控制端的输入电平,即可以对电机进行正反转作,很方便单片机的作,亦能满足直流减速电机的要求。智能车驱动电路实现如图6所示。
小车电机为直流减速电机,带有齿轮组,考虑不需调速功能,采用电机驱动芯片L293D。L293D是著名的SGS公司的产品。为单块集成电路,高电压,高电流,四通道驱动,设计用来接收DTL或者TTL逻辑电平,驱动感性负载(比如继电器,直流和步进马达),和开关电源晶体管。内部包含4通道逻辑驱动电路。其额定工作电流为1A,最大可达1.5A,Vss电压最小4.5V,最大可达36V;Vs电压最大值也是36V,经过实验,Vs电压应该比Vss电压高,否则有时会出现失控现象。表1是其使能、输入引脚和输出引脚的逻辑关系。

L293D可直接的对电机进行控制,无须隔离电路。通过单片机的I/O输入改变芯片控制端的电平,即可以对电机进行正反转,停止的*作,非常方便,亦能满足直流减速电机的大电流要求。调试时在依照上表,用程序输入对应的码值,能够实现对应的动作,调试通过。
7)寻找光源功能
方案一:在小车前面装上几个光电开关,通过不同方向射来的光使光电开关工作,从而对小车行驶方向进行控制,根据光电开关特性,只有当光达到一定强度时才能够导通,因此带有一定的局限性。
方案二:在小车前面装上参数一致的光敏二极管或者光敏电阻,再通过A/D转换电路转换成数字量送入单片机,单片机再对读入的几路数据进行存储、比较,然后发出命令对外围进*作。对方案一、二进行比较,方案二硬件稍为复杂,但能够对不同强度的光进行采集以及比较较灵活,所以采用方案二。
寻找光源电路图如图7所示。

8)显示部分(篇幅有限,详见下载)
(篇幅有限,详见下载)
用单片机定时器T0产生38KHz的方波,再用定时器T1产生250Hz的方波对38KHz方波进行调制。为了提高小车反应灵敏度,对红外线接收信号及黑带检测信号都采用中断法来处理。用定时方法对铁片检测、计量路程、倒车、拐弯及数码管动态扫描进行处理。
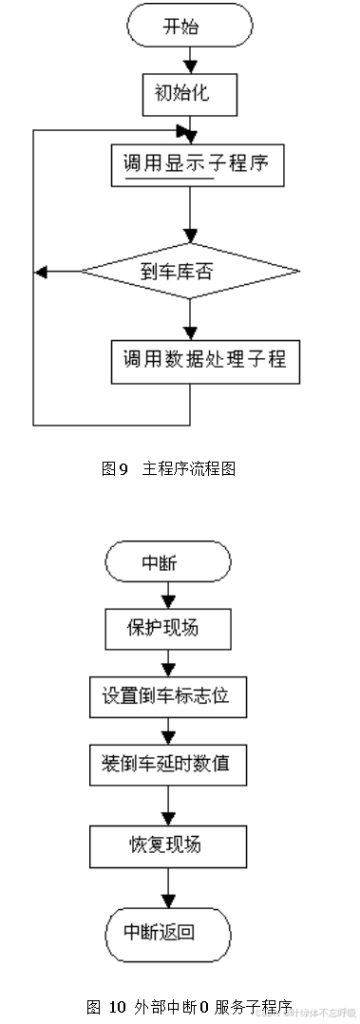
主程序流程图见图9,各子程序图见图10、图11、图12。(篇幅有限,完整详见下载)
其余完整详见下载












暂无评论内容