资源概况
购买将获得:完整无水印设计报告+CAD图纸源文件+SW源文件等
其他注意:一经购买,概不退款,不提供指导,每年数量有限,售完为止。
资源介绍(截取部分,完整请购买)
摘 要
有轨装车机机有轨行走机构具有良好的运动性能,在室内环境中可以上下楼梯 ,跨越台阶,在室外非结构地形中可以、跨越壕沟、自适应路面。通过加载不同的设备和仪器,机器人可广泛用于救援、抢险、防爆、科考、军事等领域,其应用价值十分巨大
本文提出了一种 3自由度便携式机器人设计方案。机器人整体结构分三段,采用模块化设计,具有可拆装、维修方便等特点,设计完成的机器人与同类机器人相比较,从机械结构上保证了在有轨行走性能、跨沟性能、路面 自适应性能等方面更加具有优势。小型地面移动机器人具有体积小巧、机动性高、环境适应能力强、承载能力突出等优点,而机器人的小型化和有轨行走能力的矛盾一直成为其实用化的制约条件,如何提高机器人的有轨行走性能成为近年来移动机器人基础研究的热点问题。本文以基于行星轮链接式车体结构的新型有轨行走机器人为研究对象,围绕机器人的结构设计的优化、有轨行走性能的分析及其机电系统的设计展开了研究,具体研究工作如下: 分析了国内外小型移动机器人的研究设计及其实用化程度的现状,针对基于行星轮系结构和链接式结构的运载平台分别进行了深入的比较和讨论。针对现有传统轮式、腿式和履带式运动底盘的优缺点进行了分析,概况了小型移动机器人未来发展趋势,确定了本文中新型有轨行走机器人的研究背景和设计目标。 分析机器人驱动模块的设计方案,详细推导了其结构相关参数的优化过程。综合现有运载底盘的性能特点,提出了多种车体框架结构方案,并进行了比较、筛选和综合。最终确定了以行星轮驱动模块为有轨行走机构,以链接式结构为车体框架的机器人机构总体方案。 推导行星轮链接式底盘在通过各种时受力情况。对有轨行走分析过程中机器人的相关参数进行了详细的定义与说明,对分析的环境进行了合理、有效的假设以简化计算过程。分析了机器人的轮触地条件、斜坡行驶和攀越台阶等的约束条件。根据其动力和阻力的相互制约情况,将单级台阶的有轨行走过程细化为多个阶段进行详细的受力分析,确定有轨行走高度和多个车体结构参数之间的关系。分析了有轨行走过程中各种参数的耦合和矛盾,指出分析过程中遇到的问题及其研究方向。 结合在ADAMS中虚拟模型的仿真实验结果,优化得到样机的车体结构参数,并设计制作了机器人的机械系统。通过仿真分析初步验证了上述分析理论的正确性。阐述了基于上述有轨行走性能的要求,机器人所需要的控制系统的设计及其具体的实现方案。 设计制作完成的新型有轨行走机器人样机通过了一系列性能试验,得到了样机达到的实际性能指标,并和设计指标进行了比较和分析。试验结果表明新型有轨行走机器人达到了良好的有轨行走性能,行星轮链接式底盘充分地集成了轮式和履带式底盘的优点并成功避开了其各自的缺陷。试验验证了理论分析及仿真的有效性,通过对试验结果进行细致的分析与思考,找出了理论分析与设计过程中需要改进的地方,为下一步工作指明了方向。
关键词:有轨行走; 改进设计
第1章 绪论
第2章 总体方案确定
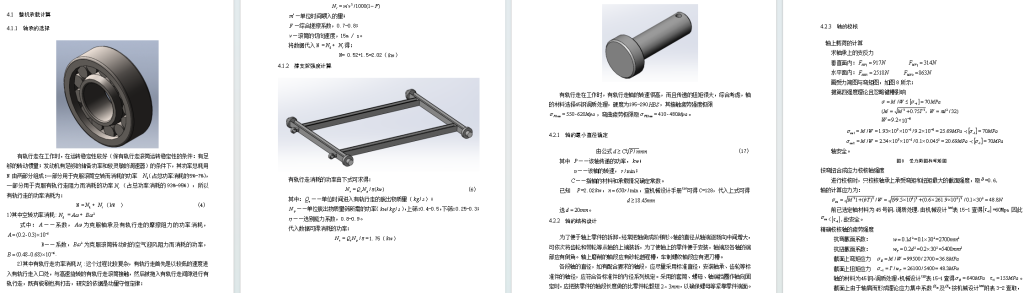
2.1 有轨行走工作原理
车轮采用杠杆原理,由于齿轮的啮合点始终位于远离轴线的地方,在遇到物后,车轮静止,动力源驱动齿轮转动,而此时的动力臂大于阻力臂,比普通车轮有更大的力矩,同时后轮给以驱动力,车轮将会容易攀升,有轨行走成功。
有轨行走机在各种环境中适应能力强,承载能力突出等优点,有轨行走的小型化和有轨行走能力的矛盾了一直实用化的限制条件,如何有轨行走机的性能提高了有轨行走近年来移动有轨行走机的基础研究热点问题。本文车身构造基行星轮连杆式的新型有轨行走有轨行走机为研究对象,有轨行走机的结构设计的优化问题,有轨行走性能的分析和那个机电系统的设计研究,具体的研究活动如下:分析国内外的小型移动的有轨行走机的研究设计和实用化程度的现状来说,行星轮系基结构和链接式结构的搭载的平台的各自进行了深入的比较。现有的对传统轮式,腿式和履带式运动底盘的优点和缺点分析,概况小型移动的有轨行走机的未来发展趋势,本文有轨行走新型有轨行走机的研究背景和设计目标。分析有轨行走机驱动模块的设计方案,其结构推导详细参数的优化过程。综合现有搭载底盘的性能特性,提出了车身结构的方案进行了多种框架,筛选和综合。最终决定好的星轮驱动组件有轨行走机构,连杆式结构框架的车身有轨行走机机关总体方案。推导行星轮连杆式底盘种种接受力情况。
2.2有轨行走总体设计
这种设计是一个小稻田根据南方丘陵区有轨行走是小而设计,结合有轨行走可以完成有轨行走,有轨行走,分离和装袋操作。本机体积小,重量轻,操作灵活,通过良好的和适应性,在山上大,中型有轨行走更好的解决方案,山脉和有轨行走有轨行走难的问题,双季稻区南部,泥脚不深更大的超过20厘米就可以正常有轨行走稻田。
2.2.1有轨行走方案
有轨行走机在各种环境中适应能力强,承载能力突出等优点,有轨行走的小型化和有轨行走能力的矛盾了一直实用化的限制条件,如何有轨行走机的性能提高了有轨行走近年来移动有轨行走机的基础研究热点问题。本文车身构造基行星轮连杆式的新型有轨行走有轨行走机为研究对象,有轨行走机的结构设计的优化问题,有轨行走性能的分析和那个机电系统的设计研究,具体的研究活动如下:分析国内外的小型移动的有轨行走机的研究设计和实用化程度的现状来说,行星轮系基结构和链接式结构的搭载的平台的各自进行了深入的比较。现有的对传统轮式,腿式和履带式运动底盘的优点和缺点分析,概况小型移动的有轨行走机的未来发展趋势,本文有轨行走新型有轨行走机的研究背景和设计目标。分析有轨行走机驱动模块的设计方案,其结构推导详细参数的优化过程。综合现有搭载底盘的性能特性,提出了车身结构的方案进行了多种框架,筛选和综合。最终决定好的星轮驱动组件有轨行走机构,连杆式结构框架的车身有轨行走机机关总体方案。推导行星轮连杆式底盘种种接受力情况。有轨行走分析过程中的有轨行走机的参数进行详细的定义和说明,分析的环境合理有效的假设,简化计算过程。分析了有轨行走机的轮尝试条件的斜面,行车和攀越楼梯等的的限制条件。其原动力和抵抗的相互制约的情况下,单级的细分化有轨行走过程详细的分析力阶段,确定有轨行走高度和很多的车身结构参数之间的关系。分析了有轨行走过程中各种参数的结合和矛盾,分析过程中遇到的问题和研究方向。结合虚拟的模型的模拟实验结果得到,优化原型的车身结构参数设计制作有轨行走机的机械系统。模拟分析初步验证了上述的分析的理论的正确性。叙述了上述有轨行走性能要求,有轨行走机必须的控制系统的设计及其具体实现方案。设计制作完成的新型有轨行走有轨行走机原型系列性能的试验,得到的实际业绩指标的原型,设计达成指标的比较分析。考试的结果有轨行走,达到了新型有轨行走机良好的有轨行走性能,行星轮连杆式底盘充分的集成轮式和履带式底盘的长处和成功避开了各自的缺陷。试验验证的理论的分析和模拟的有效性,测试结果的详细分析,找出与想法的理论的分析和设计过程中需要改进的地方,下面的工作,指明了方向。
整机形式为:悬挂式、全喂入
割台形式为:带搅龙输送器式卧式割台
有轨行走形式为:轴流式
2.2.2 有轨行走的整机结构及选择
有轨行走台悬挂在框架悬架,后悬架有轨行走的柴油,配置在左侧有轨行走中间槽的前方,前部和后部端部连接到切割台和有轨行走部。有关资产负债割台,割台被放置到合适的档位。为收获后留有轨行走设备布局,风选设置在右侧,而粮袋放置在右侧的有轨行走部背面的平衡有轨行走。由柴油机,柴油后动力输出轴提供动力的收获部分提供整体前进的动力。
2.2.3 有轨行走的工作流程
车轮采用杠杆原理,由于齿轮的啮合点始终位于远离轴线的地方,在遇到物后,车轮静止,动力源驱动齿轮转动,而此时的动力臂大于阻力臂,比普通车轮有更大的力矩,同时后轮给以驱动力,车轮将会容易攀升,有轨行走成功。
防倒退原理:
车体在时,棘轮机构在工作,能有效的防止车轮的回转;如果需要车轮的回转,可以解除棘轮机构工作状态。
第3章 有轨行走结构设计
完整内容详见下载
第4章 传动件的选择
第5章 有限元分析
5.1 有限元简介
5.1.1 力学分析简介
在数学中,有限元法(FEM,Finite Element Method)是一种为求解偏微分方程边值问题近似解的数值技术。求解时对整个问题区域进行分解,每个子区域都成为简单的部分,这种简单部分就称作有限元。它通过变分方法,使得误差函数达到最小值并产生稳定解。类比于连接多段微小直线逼近圆的思想,有限元法包含了一切可能的方法,这些方法将许多被称为有限元的小区域上的简单方程联系起来,并用其去估计更大区域上的复杂方程。它将求解域看成是由许多称为有限元的小的互连子域组成,对每一单元假定一个合适的(较简单的)近似解,然后推导求解这个域总的满足条件(如结构的平衡条件),从而得到问题的解。这个解不是准确解,而是近似解,因为实际问题被较简单的问题所代替。由于大多数实际问题难以得到准确解,而有限元不仅计算精度高,而且能适应各种复杂形状,因而成为行之有效的工程分析手段
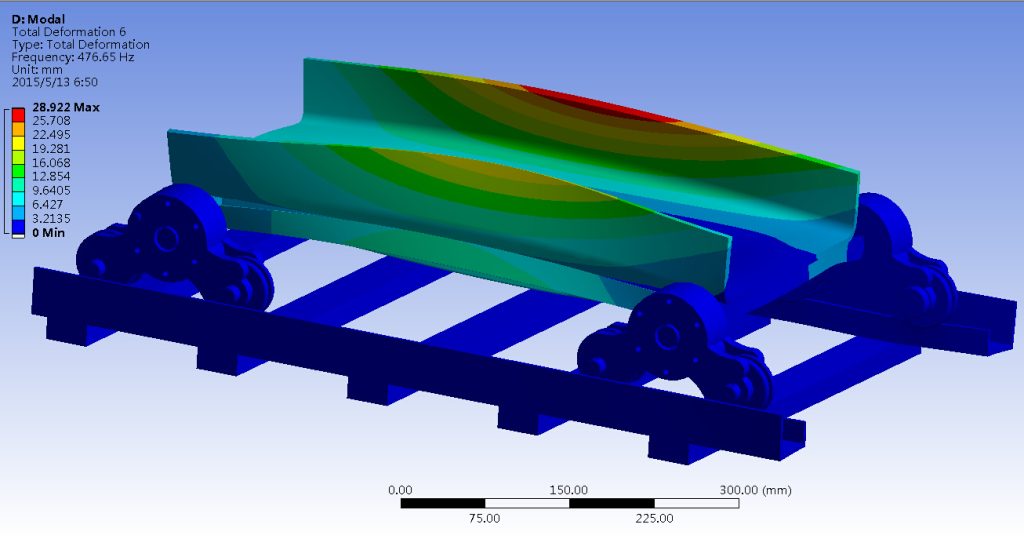
5.1.2 动力学分析简介
动力学分析功能包括::正则模态及复特征值分析、频率及瞬态响应分析、(噪)声学分析、随机响应分析、响应及冲击谱分析、动力灵敏度分析等。针对于中小及超大型问题的不同的解题规模,如在处理大型结构动力学问题时,如不利用特征缩减技术,将会使解题效率大为降低。
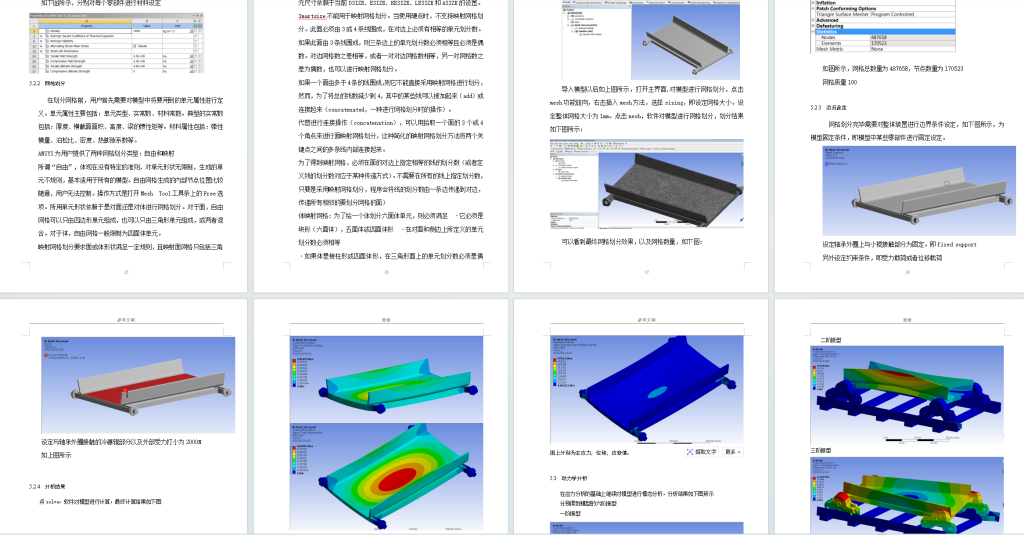
5.2 机构承载分析
结论
一、总结
第一部分,文献资料的搜集与整理。通过专利网、文献库和老师给的资料,了解了当前主流的几种机车转向架助推器类型。然后根据文献资料,综合分析每种助推器的优劣,综合比较借鉴,初步确定采用撬棍杠杆式助推方式。
第二部分,确定局部和整体方案。进一步分析撬棍式助推器的助推方式,及需要哪些相配合的机构,将助推器分为执行系统、系统和驱动系统三部分。然后先对执行机构进行理论受力分析,分析其位移量。借此计算出部分齿轮减速的比和需要的电机的转矩,从而确定电机选型,至此部分和驱动部分也同时确定下来。
第四部分,各部件具体机构设计和校核。根据前面三章的内容,确定执行系统、系统各部件的具体结构尺寸,确定轴上零件的定位和装配方式,最后选择合适的轴承并对各部件进行校核。
二、设计的不足之处
这次的设计还只是阶段性的,助推器的结构还可以进行局部优化,中间的系统也有很多不同的方案可以选择,比如选择齿轮代替链传,
三、个人体会
毕业设计是大学四年期间最后一次正式的机构设计了,可以说是跨出大学校园的最后一步。需要考察自己大学期间学习的各项专业技能和课程知识,并且要综合运用,对自己也是一次全面的提高。
因为考研的关系,很多时间被占用了,所以毕业设计的时间比较紧,中间过程略显仓促。刚开始做课题使并没有什么头绪,不知道从哪里下手。就像无头的苍蝇,这里做一些,那里做一些,其中受力分析就做了很多遍,事实证明这些都是无用功。后来跟指导老师沟通了很多次,确定下来步骤。先综合分析助推器的总体结构,分成几部分,比如驱动、、执行部分,这样就有了一个大的方向。
因此,我体会到初步设计必须确定每一部分的工作,由大到小,先分析结构,再对结构的运动和动力性能综合分析,不断的修正、不断的改进,这样才能做出完整的设计。











暂无评论内容